로보틱스
HOME
솔루션
로보틱스
너트런너 체결 로봇 자동화
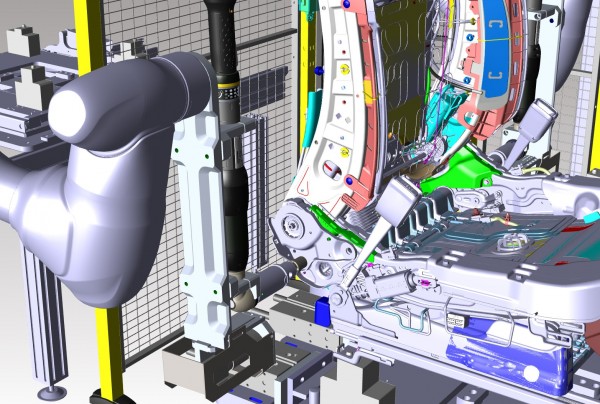
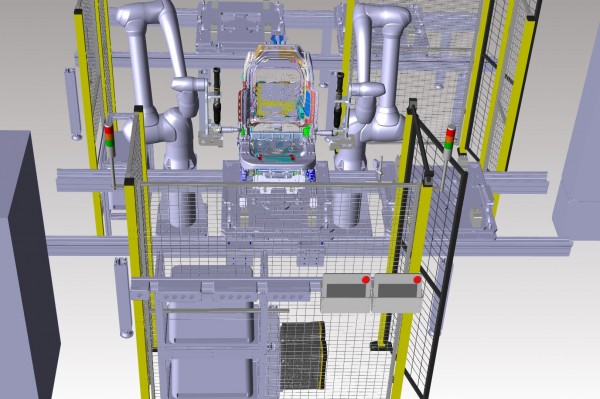
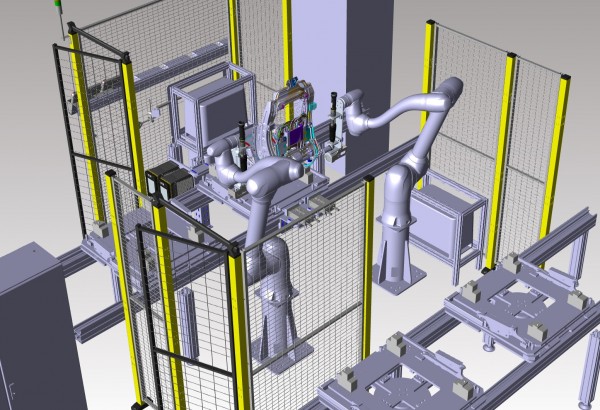
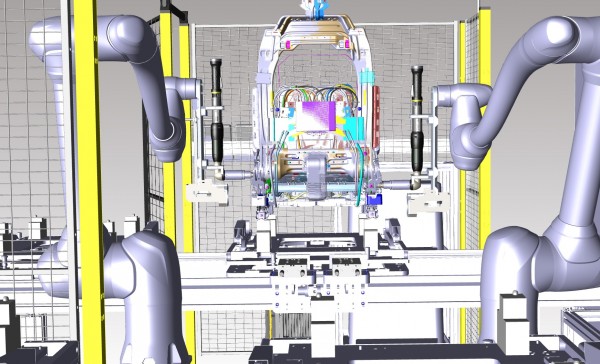
(주)브릴스의 너트런너 체결 로봇 자동화 시스템은 협동 로봇, 2D 비전, 그리고 아틀라스콥코의 앵글타입 너트런너 툴과 컨트롤러를 활용하여 고반력, 고토크의 체결 작업을 수행합니다. 이 시스템은 2D 비전을 통해 홀의 중심축을 측정하고 이 정보를 로봇에 전송하여 정확한 체결 위치를 찾아내는 방식으로 동작합니다. 협동 로봇은 2D 비전 카메라로부터 전달받은 좌표를 바탕으로 이동하고 체결 작업을 수행합니다. 이러한 방식을 통해 시스템은 최소한의 공간을 활용하면서도 정확한 위치에서 고반력과 고토크를 이용하여 볼트를 체결합니다. 장점으로는, 비전 시스템을 통한 정확한 위치 보증이 가능하여 완벽한 작업 수행이 가능하다는 점을 들 수 있습니다. 이러한 장비의 세부 사항과 기능은 홈페이지의 문의 또는 기술영업부 담당자로부터 확인하실 수 있습니다.
기술 영업부에 문의